















1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
Skylar Tibbits
Logic Matter: Digital Logic as heuristics for physical self-guided-assembly
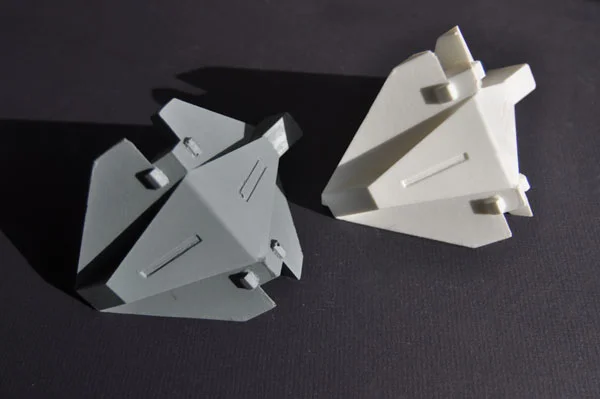
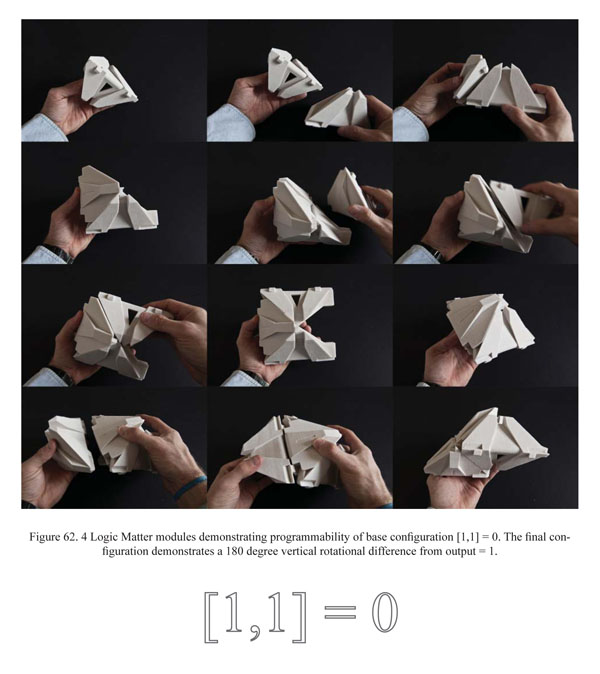
In this project I introduce Logic Matter as a system of passive mechanical digital logic modules for self-guided-assembly of large-scale structures. As opposed to current systems in self-reconfigurable robotics, Logic Matter introduces scalability, robustness, redundancy and local heuristics to achieve passive assembly. I propose a mechanical module that implements digital NAND logic as an effective tool for encoding local and global assembly sequences. I then show a physical prototype that successfully demonstrates the described mechanics, encoded information and passive self-guided-assembly. Finally, I show exciting potentials of Logic Matter as a new system of computing with applications in space/volume filling, surface construction, and 3D circuit assembly.
Advisor: Terry Knight
Professor of Design and Computation, Department of Architecture, MIT
Advisor: Patrick Winston
Ford Professor of Artificial Intelligence and Computer Science, EECS, MIT
Reader: Erik Demaine
Associate Professor, EECS, MIT